Lab 2
The main objective of this lab was to get us familiar with the Bluetooth commands and make sure it worked with our Artemis boards
Code Setup
First, we needed to install Python (I already had Python and pip3 installed)
Next, we created and activated a virtual environment by running the following commands in a terminal (Command Prompt for me, a Windows user):
python3 -m pip install --user virtualenv
python3 -m venv FastRobots_ble
.\FastRobots_ble\Scripts\activate
After this, we installed the necessary packages with the following command (though I later installed matplotlib as well using pip3)
pip install numpy pyyaml colorama nest_asyncio bleak jupyterlab
pip3 install matplotlib
In order to run the Python side of things, we used Jupyter which we could activate within our virtual environment using the command
jupyter lab
I then copied the given codebase into the project directory, which contained the base .ino files needed for the Artemis board. The codebase appears to be made up of a Python and Arduino half. The Python half allows us to communicate with the board through Bluetooth and send commands to the Artemis board, while the Arduino half is where we code in the actual commands that we want executed.
Arduino comes with a library that supports Bluetooth Low Energy (BLE) which is used with Bluetooth 4.0 (and better). We installed this in the Arduino IDE and burned the given ble_arduino.ino sketch into the Artemis board. After uploading this, the Artemis board printed its MAC address to the Serial monitor:
I also had to update the MAC address in the connection.yaml file, as well as create a new UUID for our board so that we wouldn’t accidentally connect to any other boards. In order to generate these new UUIDs, we ran the following code, which was given to us in the demo.ipynb file:
from uuid import uuid4
uuid4()
I updated the ble_arduino.ino and connections.yaml files with this new uuid.
Demo
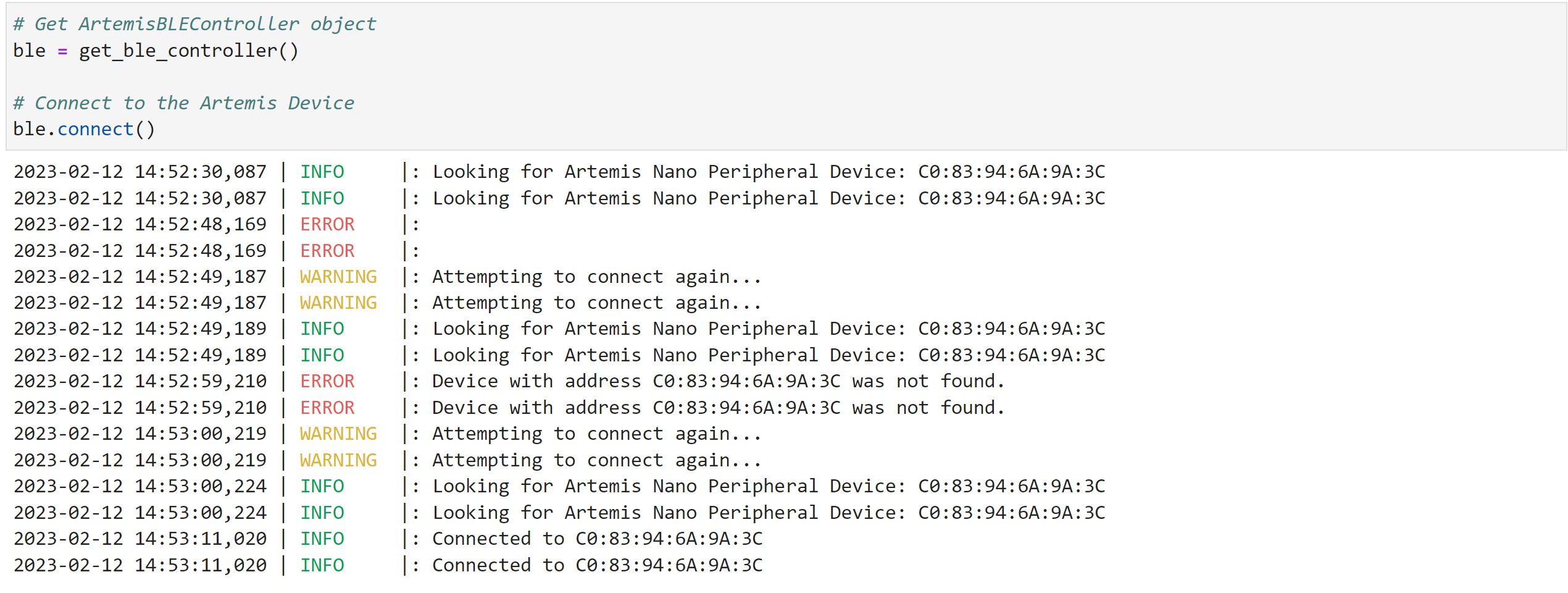
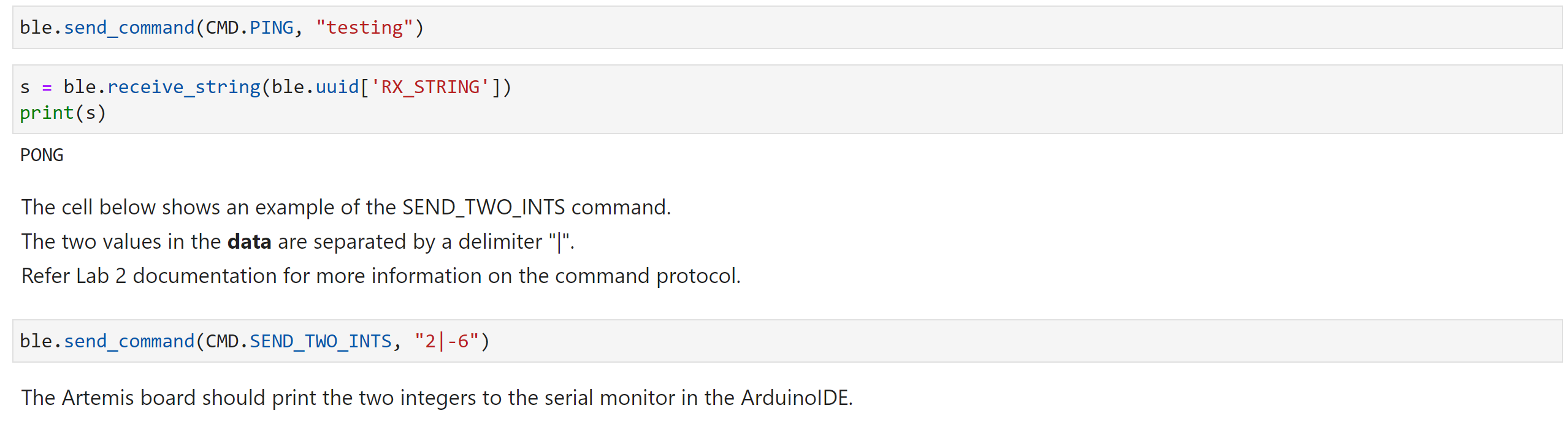
We were given a demo.ipynb file to run to ensure that everything worked.
If everything worked, we should have been able to run every cell. Here are the outputs from the cells when I ran through the file:

 And the Arduino Serial monitor when I ran PING and SEND_TWO_INTS:
And the Arduino Serial monitor when I ran PING and SEND_TWO_INTS:
 Interestingly, running the ble.disconnect() wouldn’t always work cleanly and often made my notebook run that cell forever, so I simply pushed the reset button on the Artemsis to disconnect it for a lot of the tasks.
After proving everything worked, I started on the tasks.
Interestingly, running the ble.disconnect() wouldn’t always work cleanly and often made my notebook run that cell forever, so I simply pushed the reset button on the Artemsis to disconnect it for a lot of the tasks.
After proving everything worked, I started on the tasks.
Task 1
For this task, we simply had to make an ECHO command where the robot would return the string that we wrote to the Artemis board. (modified a little bit). The processing of the string was made much easier by the EnhancedString class given to us. The Arduino code is below:
char char_arr[MAX_MSG_SIZE];
// Extract the next value from the command string as a character array
success = robot_cmd.get_next_value(char_arr);
if (!success)
return;
/* /*
* Your code goes here.
*/
//Making an enhanced string
tx_estring_value.clear();
tx_estring_value.append("Robot says: ");
tx_estring_value.append(char_arr);
tx_estring_value.append("!");
//This is sending the string back to my computer
tx_characteristic_string.writeValue(tx_estring_value.c_str());
And the Python code + output:

Task 2
Our next task was to make a command that returned the time. For this task, we also had to edit the cmd_types.py file and the enum CommandTypes function in ble_arduino.ino in order to add a new command. This allows us to assign an integer value to each command String, which is necessary for the switch function as the cases of the switch function cannot be a string. The millis() function in Arduino was also needed.
The Arduino code:
//Building the string I want
tx_estring_value.clear();
tx_estring_value.append("T: ");
time_d = millis();
tx_estring_value.append(time_d);
//This is sending the string back to my computer
tx_characteristic_string.writeValue(tx_estring_value.c_str());
And the Python code + output:

Task 3
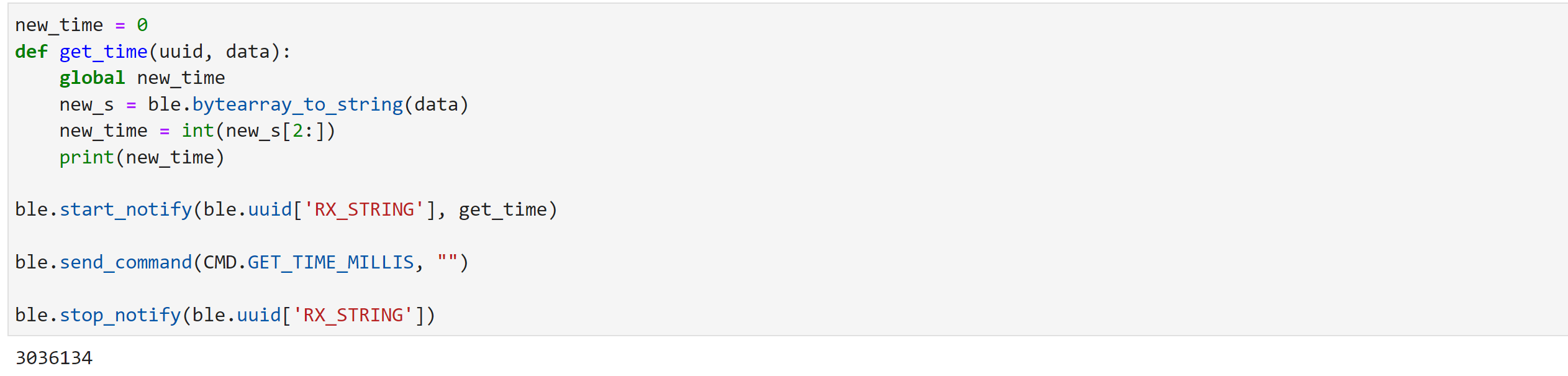
The next task was setting up a notification handler to process any incoming data. Essentially, a notification handler executes a function anytime data with a specific UUID is received from the BLE device. Thus, I set up a function that would extract the time from the string and converted it back to an integer. One thing to note is that if you ran start_notify twice without running stop_notify in-between, then it would execute the function twice. The Python code + output (note that I’ve been running this for a very long time):
Task 4
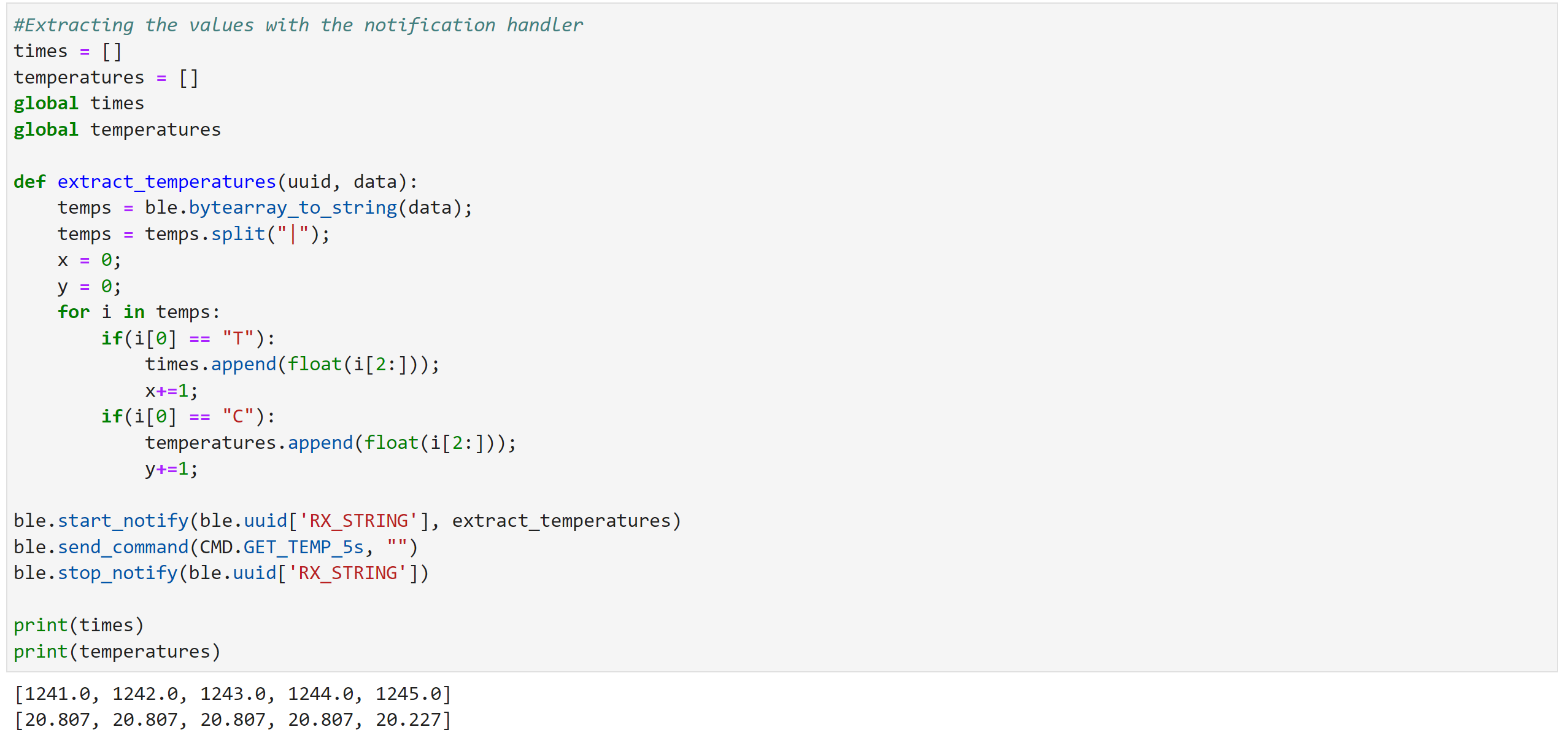
The next task was making a function that would take the temperature at 1 second intervals over 5 seconds and then returning a time-stamped string of temperatures. I accomplished this using the built-in getTempDegC() function, which converted the temperature to Celsius for me. I used “|” as a delimiter for future processing with a notification handler. to split the strings and extract the times and temperatures. Note that I extracted the time in seconds this time instead of milliseconds like in Task 3.
Arduino code:
//Building the string I want
tx_estring_value.clear();
for(int i = 0; i < 5; i++){
tx_estring_value.append("T:");
tx_estring_value.append((float)(millis()/1000));
tx_estring_value.append("|C:");
tx_estring_value.append(getTempDegC());
if(i != 4){
tx_estring_value.append("|");
}
delay(1000);
}
tx_characteristic_string.writeValue(tx_estring_value.c_str());
And the Python code + output:

Notification handler:
Task 5
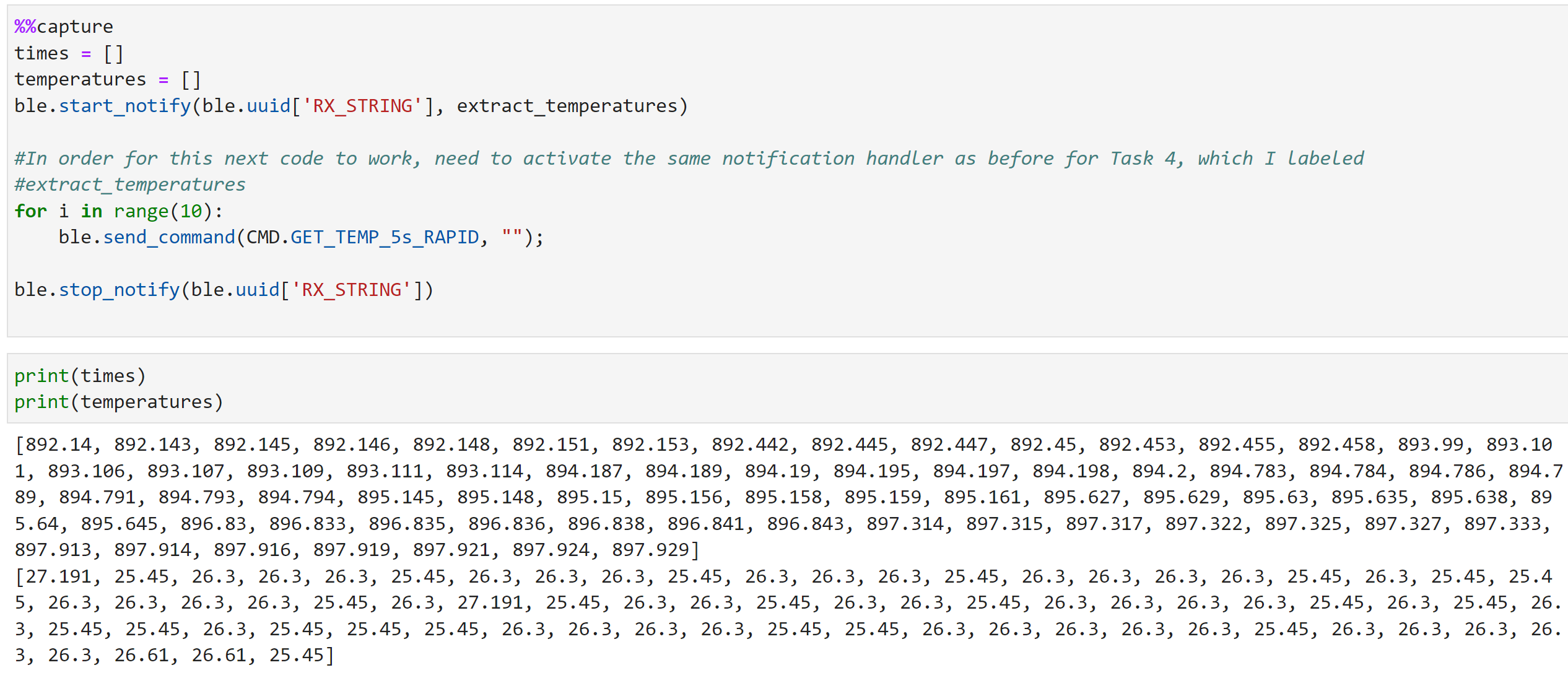
The next task was to send 5 seconds worth of rapidly sampled temperature data. Now because there would be so much data, it wouldn’t be possible to send it back in one string. I originally planned on storing everything on chip and then transferring after 5 seconds (which is the more optimal way to do it) but I decided against this because I knew that arrays in C++ aren’t variable in size but have a fixed memory allocation so I wasn’t sure how else to store the data on-chip. Thus, I decided to send a the GET_TEMP_5s_RAPID command as fast as possible over 5 seconds instead and used the exact same notification handler as Task 4 to process the data. In order to know how many times I needed to send the code, I timed it within Python in a similar fashion to the first MEng task.
Arduino code:
tx_estring_value.clear();
time_elapsed = millis();
for(int i = 0; i < 7; i++){
tx_estring_value.append("T:");
tx_estring_value.append((float)millis()/1000);
tx_estring_value.append("|C:");
tx_estring_value.append(getTempDegC());
tx_estring_value.append("|");
}
tx_characteristic_string.writeValue(tx_estring_value.c_str());
Serial.printf("Time elapsed: %d ms\n", millis()-time_elapsed);
Python code:
Limitations
The limitations of storage are dependent on RAM as well as global variables that we define within our program. Generally, if we sample 16 bit values (which are equal to 2 bytes) sampled at 150 hz, that means that in 1 second, we would have 300 bytes of data already and in 5 seconds, we would have collected 1.5 kB worth of data. That’s not even close to the 384 kB of RAM that we have on the chip, which is good. However, we have to account for the fact that we might have multiple variables to collect, and each extra global variable means that we will have less storage space and less time before our RAM fills up.
MEng Task 1
The first MEng task was to evaluate if the size of the message that we sent and received to and from the board mattered in terms of response time. To test this, I first sent a 5 byte message “5byte” 10 times and used the time.time() function to time it in Python. I put one before I sent the command and the next one in the notification handler to time how long it took for the Artemis to respond. The command I used was the ECHO command since it both received and sent data. I did the same with a 120 byte message and then compared the two in a bar graph with error bars. Python code:
start_time = time.time()
t_elapsed = 0
time_5bytes = []
global start_time
global t_elapsed
global time_5bytes
def stopwatch(uuid,data):
stop_time = time.time()
t_elapsed = stop_time - start_time
time_5bytes.append(t_elapsed)
ble.start_notify(ble.uuid['RX_STRING'], stopwatch)
for x in range(10):
start_time = time.time()
ble.send_command(CMD.ECHO, "5byte")
ble.stop_notify(ble.uuid['RX_STRING'])
time_5bytes.pop()
print((time_5bytes))
print(np.mean(time_5bytes))
print(np.std(time_5bytes))
start_time = time.time()
t_elapsed = 0
time_120bytes = []
global start_time
global t_elapsed
global time_120bytes
def stopwatch1(uuid,data):
stop_time = time.time()
t_elapsed = stop_time - start_time
time_120bytes.append(t_elapsed)
ble.start_notify(ble.uuid['RX_STRING'], stopwatch1)
for x in range(10):
start_time = time.time()
ble.send_command(CMD.ECHO, "120bytesxD120bytesxD120bytesxD120bytesxD120bytesxD120bytesxD120bytesxD120bytesxD120bytesxD120bytesxD")
ble.stop_notify(ble.uuid['RX_STRING'])
time_120bytes.pop()
print((time_120bytes))
print(np.mean(time_120bytes))
print(np.std(time_120bytes))
ble.stop_notify(ble.uuid['RX_STRING'])
x_t = ["5 Bytes", "120 Bytes"]
means = [np.mean(time_5bytes), np.mean(time_120bytes)]
errs = [np.std(time_5bytes), np.std(time_120bytes)]
colors = ['tab:red','tab:blue']
fig, ax = plt.subplots()
ax.bar(x_t, means, yerr=errs, color = colors, align='center', ecolor='black', capsize=10)
ax.set_ylabel("Time (s)");
ax.set_title("Average Response Time Based on Different Message Sizes");
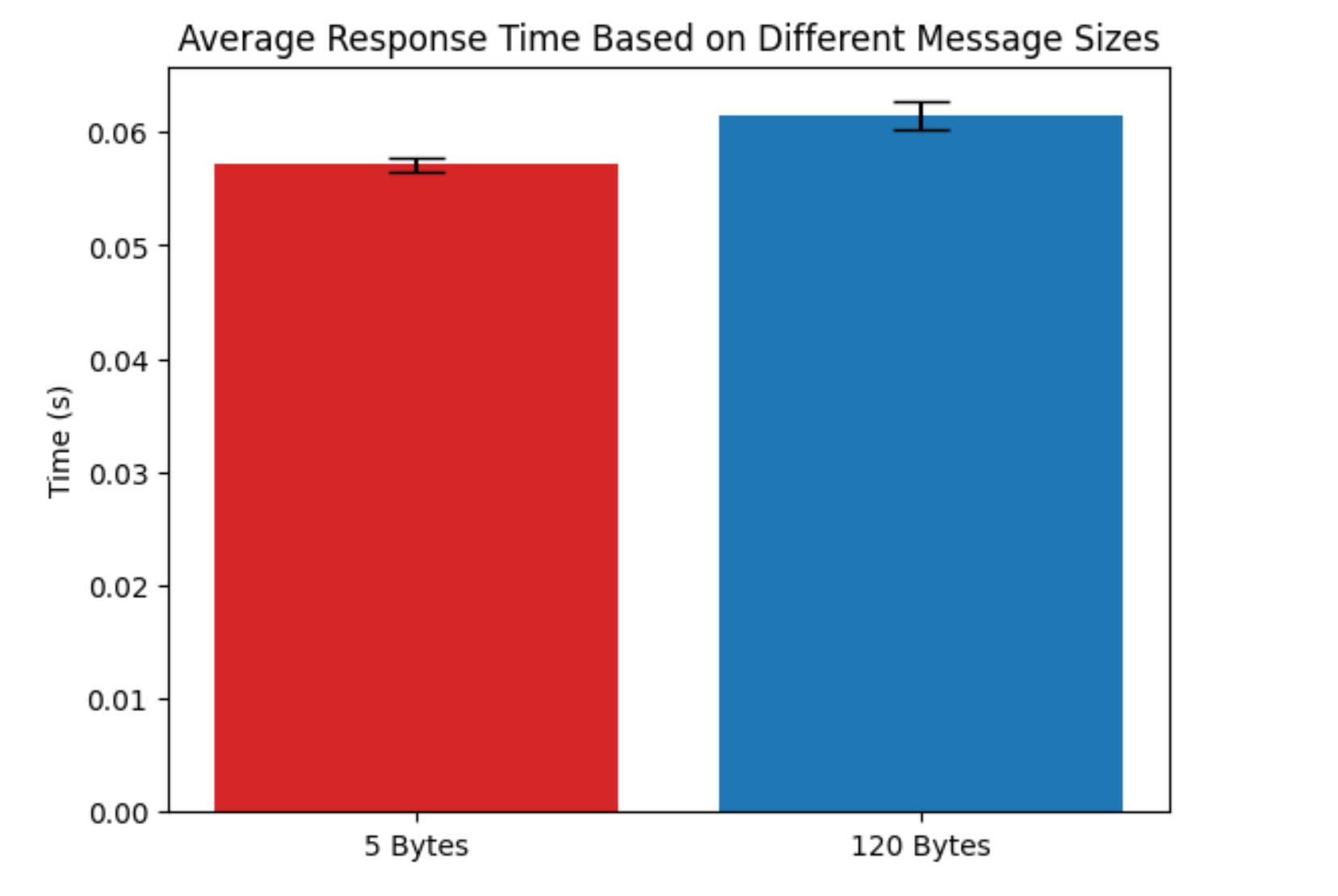
I noticed that there wasn’t really a big difference in the timing, with a really small difference in about 10 ms between the two message sizes. However, this means that it’s generally more efficient to send data back in 120 byte segments as it would take 12 5 byte messages to send the same amount of data as a single 120 byte message.
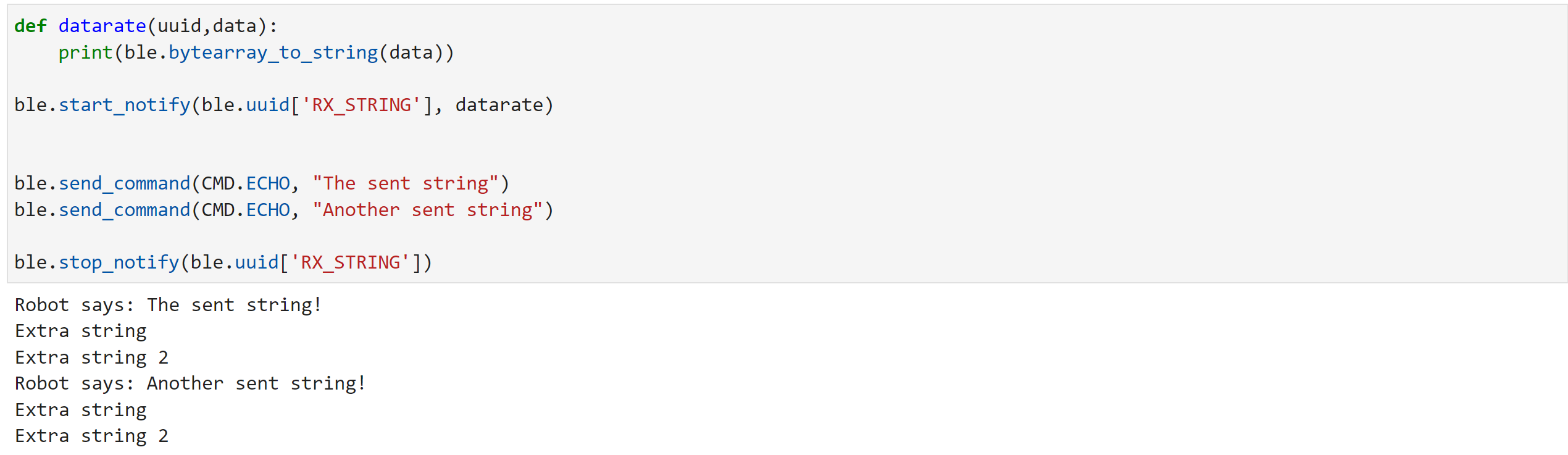
### MEng Task 2
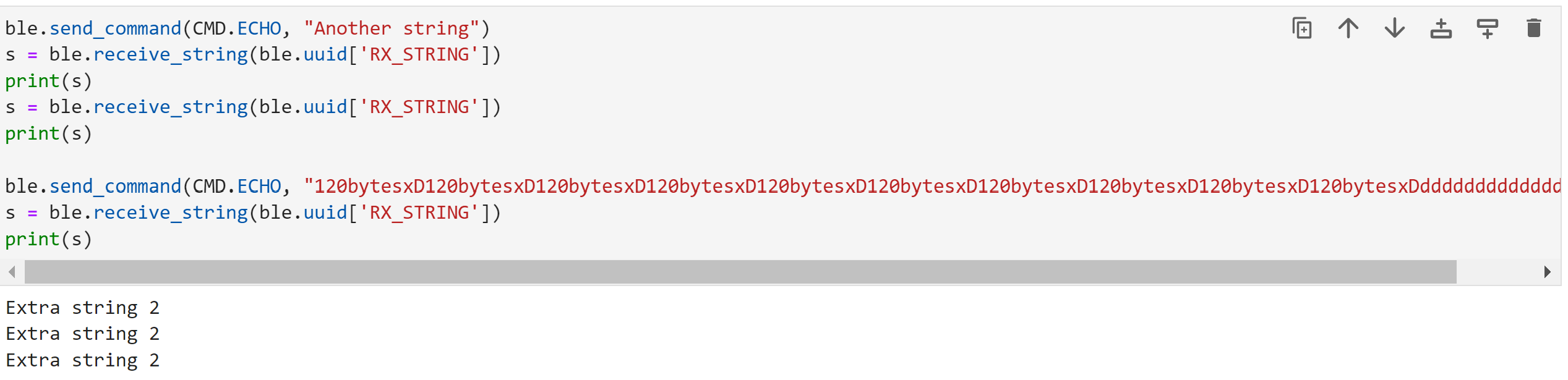
The second task was to test what happens if we send data back from the Artemis board really quickly. In order to test this, I added an extra line to the ECHO command where I write back the echo string and then wrote back a second and third string in the Arduino code without any delay. I then used the notificaion handler to just print whatever string was receieved. I also tested it without a notification handler and used the receive_string() command to see what would happen. When I used the notifcation handler, I didn’t lose any data but when I used the receive_string() command, I lost the echoed string. Thus, it appears that if we use the notification handler, then everything will be caught but if we don’t, then only the last string will be caught. Arduino code:
char char_arr[MAX_MSG_SIZE];
// Extract the next value from the command string as a character array
success = robot_cmd.get_next_value(char_arr);
if (!success)
return;
/*
* Your code goes here.
*/
//Making an enhanced string
tx_estring_value.clear();
tx_estring_value.append("Robot says: ");
tx_estring_value.append(char_arr);
tx_estring_value.append("!");
//This is sending the string back to my computer
tx_characteristic_string.writeValue(tx_estring_value.c_str());
tx_characteristic_string.writeValue("Extra string");
tx_characteristic_string.writeValue("Extra string 2");
With notification handler:
 Without notification handler:
Without notification handler: